

AEROSPACE MISSIONS
Space Exploration Missions enables anyone to use our simulator to develop autonomous AI algorithms for exploration devices deployed on extraterrestrial planets. These algorithms can perform tasks such as perception, navigation, and obstacle avoidance.
REALSIM
MULTIPLE TASK
ORBIT
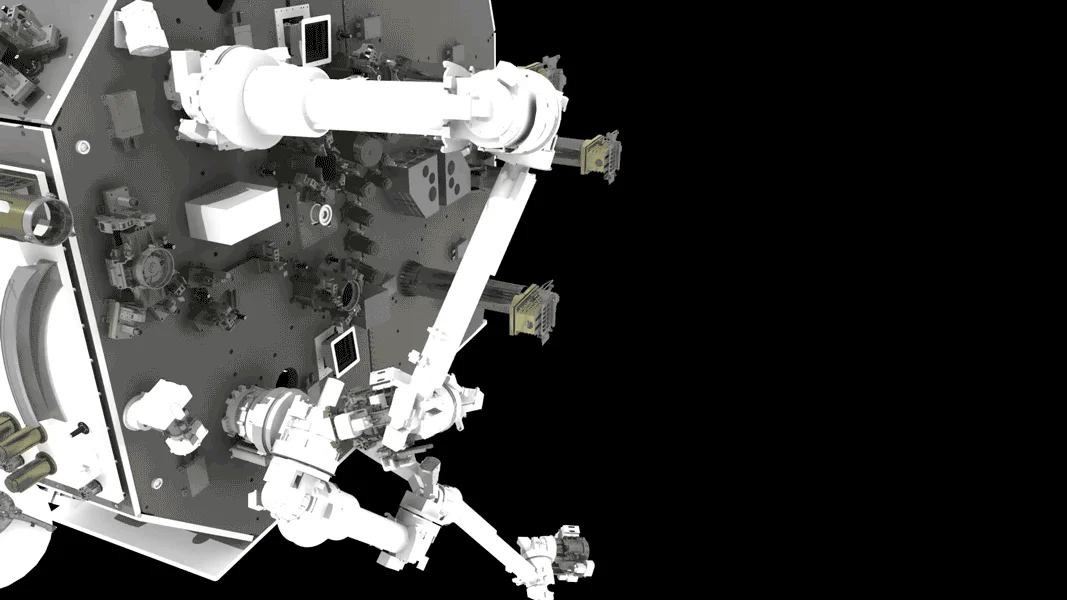
Currently, there are approximately 4,852 satellites in orbit, playing a vital role in communications, remote sensing, and other missions. Almost all satellites, once malfunctioning, are beyond repair and become space debris. All construction and repair work in space relies, at least in part, on extremely costly astronauts. We are working to find ways to enable robotic mechanics in space to perform repairs when satellites malfunction.
LANDING

Landing Tasks deal with the precise delivery of robotic systems or payloads from orbit to planetary surfaces. A prime example is the Mars Perseverance rover, which utilized real-time vision-based hazard detection during descent to land safely in Jezero Crater. Challenges here include simulating atmospheric entry dynamics, accurately modeling parachute deployment and retro-thruster control, and ensuring autonomous hazard avoidance for pinpoint landings on unpredictable terrain—all within seconds and with minimal ground intervention.
EXPLORATION

Surface Exploration Tasks involve autonomous rovers conducting long-term traversal, analysis, and decision-making across planetary landscapes. These missions demand robust planning and perception systems capable of navigating rough, dusty, and visually ambiguous terrains. Key difficulties include generating terrain-aware routes under uncertainty, handling degraded sensor performance due to environmental extremes (e.g., low light or dust storms), and maintaining mission continuity during communication blackouts, where real-time human intervention is impossible.
FEATURES
SIMULATION
SURVEILLANCE
MAINTENANCE
WORK FLOW
Operational Design Domain
Define the environmental requirements for the robot to work properly.
Pre-trained Model
Choose pre-trained models for perception, planning, and control models.
Fine-Training and Optimizations
Fine-tune model parameters and optimize algorithm engineering.
Defining Onboard Sensors
Choose from a variety of sensors.
Kinetic Calibration
Define motor parameters and calibrate dynamic model.
Simulation and Data Collection
Validate algorithms in simulation and collect your own training data.
Simulation Data
Sensor data, trajectory data, inference result data
Simulation and Metric Test
Perform metric evaluation on the standard test set to observe the core indicators of the algorithm.
Users can use our tools to build their own commercial space projects. In addition to the classic space project cases we provide, you can still continue to build your own commercial space projects.
For information about our launch services,contact sales.aero@starcloneinc.com